¿Por qué un horno eléctrico?
Me decidí por
un horno eléctrico por varios motivos:
Limpio y silencioso.
Los hornos eléctricos son mucho más limpios y silencioso frente a los hornos a carbón
o gas.
Mas seguro. También
lo considero más seguro ya que mi idea es usarlo con crisoles de acero
solamente para fundir aluminio y un horno eléctrico resistivo jamás sería capaz
de fundir el crisol.
Fácil control
de temperatura. Con el agregado de una termocupla y un sistema de control es relativamente
sencillo poder control la temperatura con precisión.
Se puede usar
en el interior. Siempre que el ambiente esté bien ventilado y recomiendo el uso
de mascara sobre todo para fundir piezas con pintura como latas de cerveza.
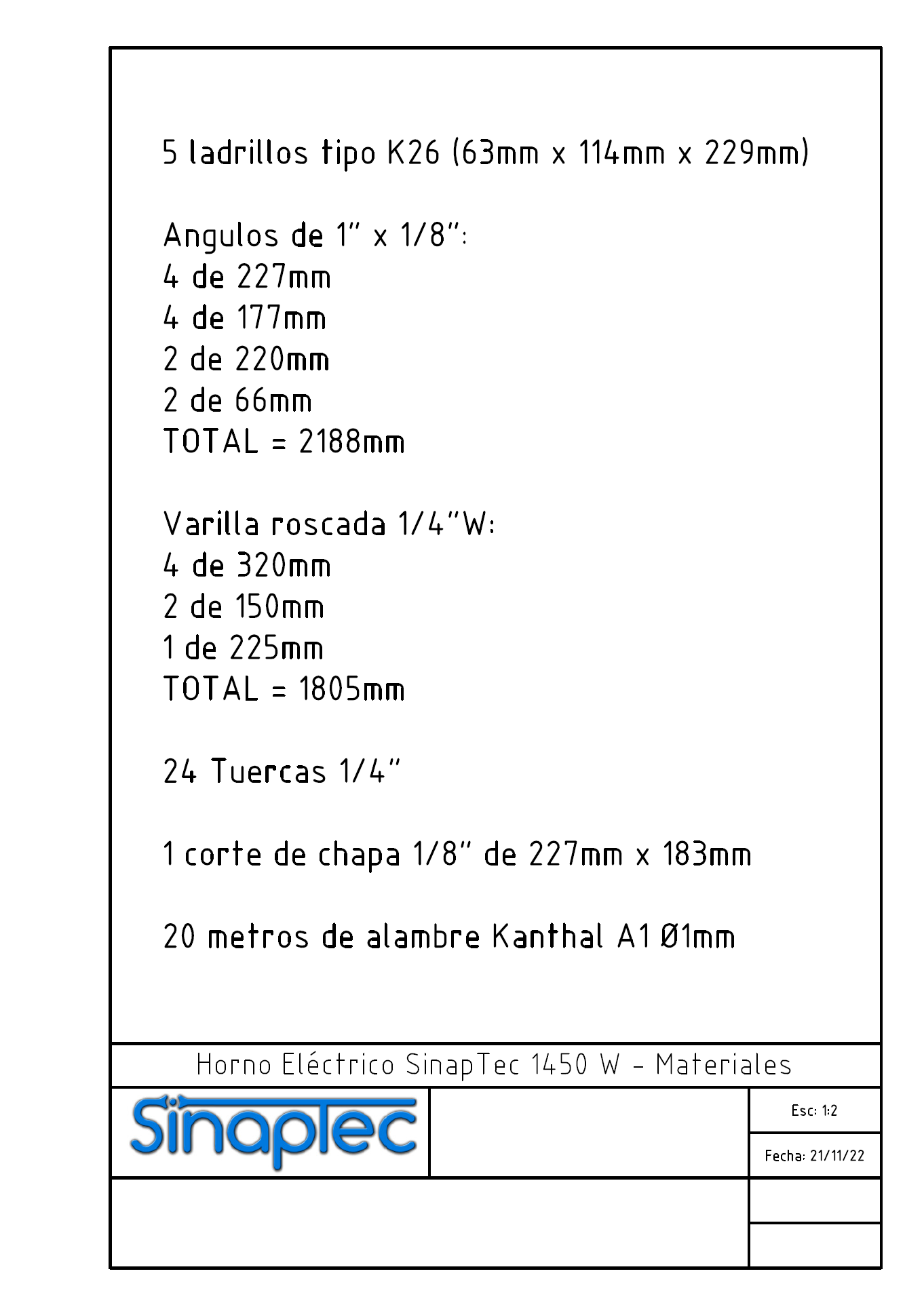
Materiales Principales:
5 ladrillos
tipo K26 (63mm x 114mm x 229mm) (5 x $860 15/11/22 ~ 15 u$s)
20 metros de
alambre Kanthal A1 Ø1mm ($4000 15/11/22 ~ 14 u$s)
½ ángulo de 1”
x 1/8” (3000mm) ( ~ 5 u$s)
2 varillas
roscadas de ¼”W (1000mm c/u) (2 x $270 15/11/22 ~ 2 u$s)
24 tuercas de ¼”W
(0,5 u$s)
1 corte de
chapa de 1/8” de 227mm x 183mm ( ~ 3 u$s)
Otros Materiales:
Cable eléctrico
Enchufe macho
10A
2 tornillos de 5/32”
x 2 ½”, tuercas y arandelas
Aerosol alta
temperatura
Construcción:
Resistencia:
Yo compré 30 metros de alambre
Kanthal A1 Ø1mm que es una aleación de hierro cromo y aluminio. Finalmente
utilicé menos de 20 metros.
Al alambre hay
que darle forma de “resorte” eso lo hice usando 2 recortes de madera, algunos
tornillos, una varilla de acero inoxidable Ø8mm x 1000m de largo.
Dejo el link a
un video en YouTube donde se explica en detalle este método.
https://www.youtube.com/watch?v=I-5_MN5_Fmc
Dejé unos 250mm
sin roscar para hacer un extremo enrollando el alambre sobre si mismo.
Luego hay que
estirarlo tirando desde el extremo contrario (no hacerlo por tramos). Medir 33 ohms
y alisar 250mm para hacer la otra punta del alambre.
Hay que estirar
la resistencia hasta que mida 1850mm sin contar las puntas.
Ángulos de 1" x 1/8":
4 de 227
4 de 177
2 de 220
2 de 66
TOTAL = 2188
Varilla Roscada 1/4"W:
4 de 320
2 de 150
1 de 225
TOTAL = 1805
24 tuercas 1/4"
1 corte de Chapa 1/8" 227 x 183
Primera corté
todos los ángulos y las varillas roscada. Luego realicé las perforaciones de Ø 7mm
en los ángulos y las chapas de manera tal que queden hermandas. Seguido de esto hice los despuntes de los
ángulos de 177mm de largo. Con la ayuda de sargentos posiciones los ángulos en
los ladrillos y los soldé (yo lo hice muy ajustado para disminuir la fuga de
calor y cuando lo desarmé se me rompieron parte de 2 ladrillos). Todos estos
trabajos los hice en la fábrica donde trabajo con cierra sin fin, agujereadora
de banco, soldadora mig, guillotina para cortar la chapa, etc.
Los ángulos de
220m llevan un corte en ángulo que permite que la tapa del horno quede abierta
a aproximadamente 110º.
Ladrillos:
Estos ladrillos
son muy fáciles de mecanizar y por ende también muy frágiles por lo que hay que
hacerlo con cuidado de no golpearlos. Son ladrillo con un alto contenido de alúmina
por lo que es indispensable hacer todos los trabajos en los ladrillos usando
SIEMPRE una semi máscara con filtro de partículas.
Perforación:
Coloqué las
varillas roscadas para mantener las 2 estructuras y los 4 ladrillos. Usé otros 4
ángulos de 1” x 1/8” de aproximadamente 120mm con una perforación en un extremo
para posicionar un tubo sin costura Ø88,9x5,49 x 120mm de largo que es la guía
de la perforación. La perforación la hice manualmente usando un tubo estructural
de Ø 3” x 1/8” (Ø76,2 x Ø3,2) x 380 mm de largo, al que le hice “dientes” con
la amoladora angular. Todo el proceso me llevo unos 30 minutos. Por mi trabajo
dispongo de ese tipo de tubos como material de descarte, pero el trabajo se
puede hacer más fácilmente con mecha copa y agujerea dora de banco. La perforación
final quedó de Ø 78mm.
Tapa y Base:
Para la tapa y
la base hay que cortar el quinto ladrillo a la mitad usando un serrucho.
La tapa lleva 2
muescas por donde pasan las parillas roscadas. Dicho mecanizado se puede realizar
fácilmente en minutos usando las mismas varillas roscadas a forma de lima.
Para el base
primero coloque una cinta de papel a 20mm a modo de guía. Luego centré un tubo estructural
de Ø 3” x 1/8” (Ø76,2 x Ø3,2) al que usé como plantilla. Y con el serrucho y
una lima plana rebaje los 20mm de la base.
Hélice para
alojamiento de resistencia:
Este es el mecanizado
más complicado y demandante; me llevo algo más de 2 horas.
La hélice generatriz
tiene un Ø de 90mm, 6 revoluciones y un crecimiento vertical de 28 mm/rev.
Resultando una altura total de la generatriz de 168mm (6x28). Mi resistencia
realizada con la varilla Ø8mm quedó de un Ø exterior de 10,5mm, por lo que el alojamiento
lo hice de Ø11 y 11 mm de profundidad.
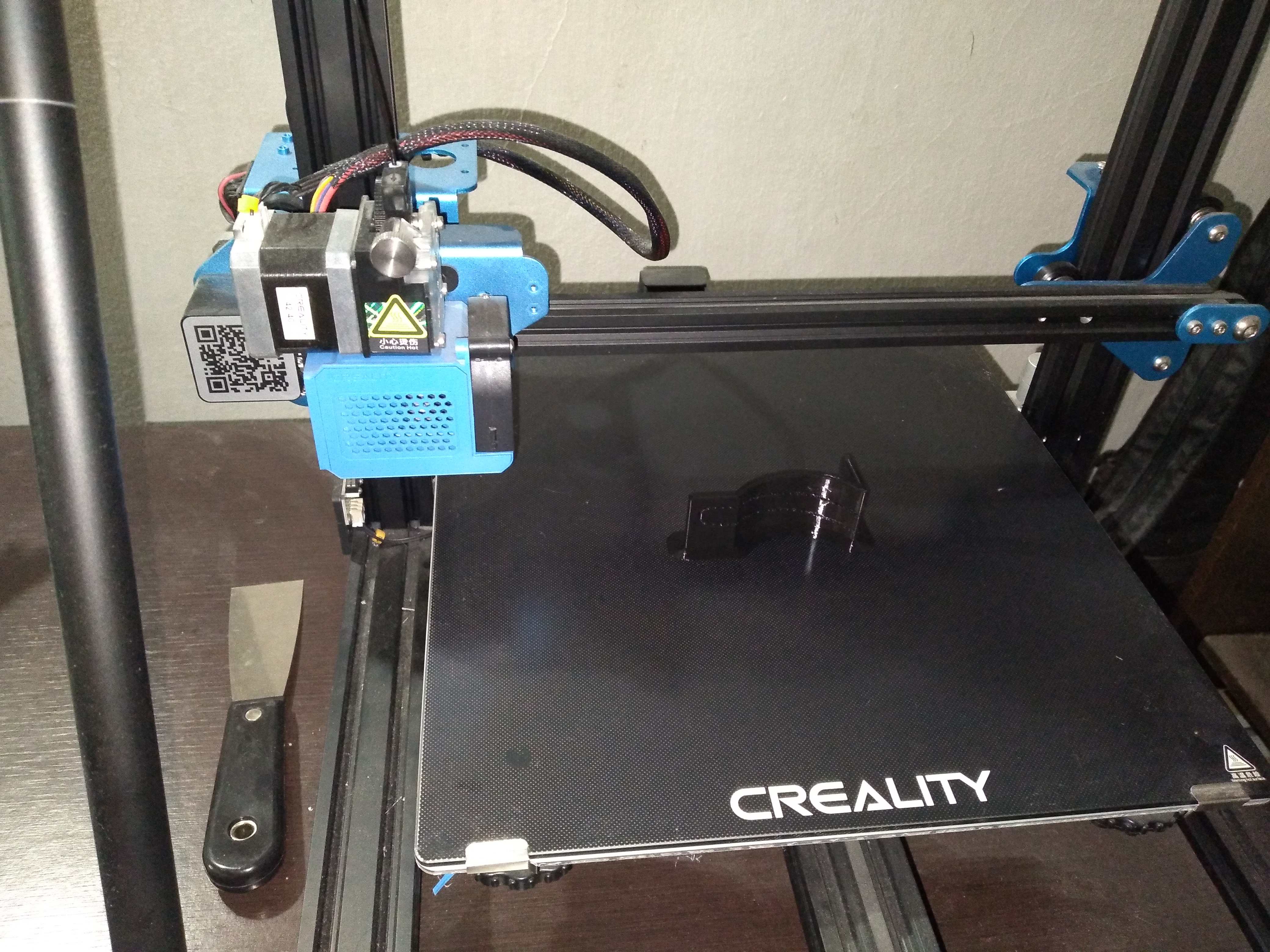
Como guía
modelé e imprimí en 3D una plantilla. Para empezar, hay que
ubicarla a 16mm de la parte superior y entre ranuras de un ladrillo hay que
bajar 28mm. Para marcar las ranuras en el siguiente ladrillo hay que bajar 7mm
(28/4).
Para mecanizar
las ranuras use una herramienta hacha con una hoja de cierra y limas redondas.
Por último,
realice 2 perforaciones para pasar los extremos del las resistencias y los
tornillos de 5/32” W x 2 1/2”
El desarrollo
de la hélice es de aproximadamente 1700 mm, pero la resistencia la estire hasta
1850mm. Esto es apropósito hay que ir comprimiendo un poco la resistencia mientras
la colocamos en el alojamiento, esto nos asegura que la resistencia quede
dentro del alojamiento sin necesidad de otra fijación. Por este motivo preferí
hacer una hélice frente a otras disposiciones mas simples como alojamientos verticales.
Se me partieron
2 ladrillos al desarmarlo a pesar de tener mucho cuidado. Simplemente guarde lo
pesados, los volví a colocar y quedó perfecto.
Trabajos Pendientes:
Patas:
Las varillas
roscadas sobrantes en la parte inferior están pensadas para colocar algún tipo
de patas regulables que aseguren que el horno quede nivelado.
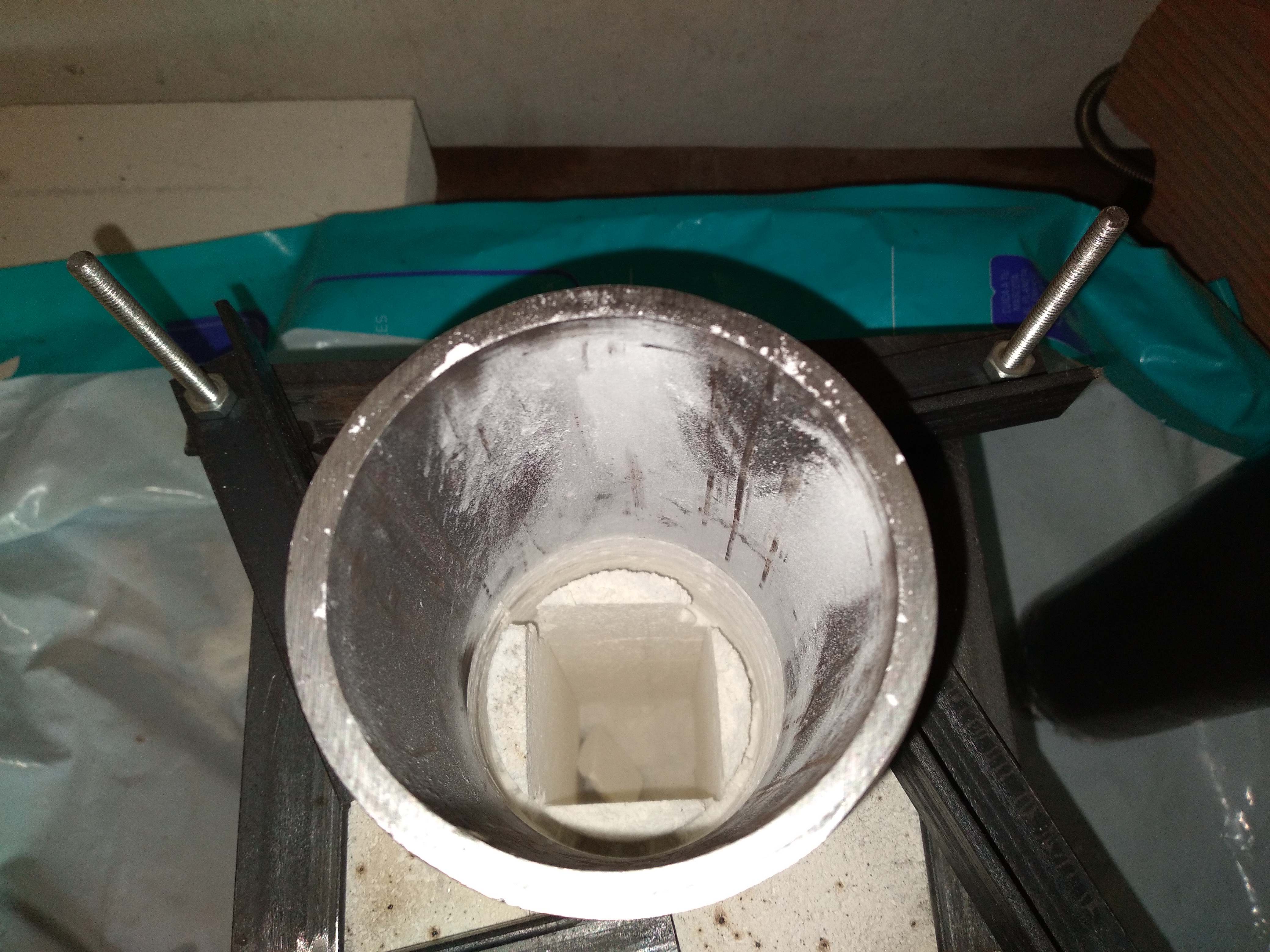
Crisol:
Como primer
crisol usé un tubo sin costura Ø50,8 x 5mm al que le soldé en la parte inferior
un disco de 3/8” de espesor.
No quiero
entrar en mucho detalle sobre esto ya que tengo pensado hacer otro crisol con
agarres más seguros.
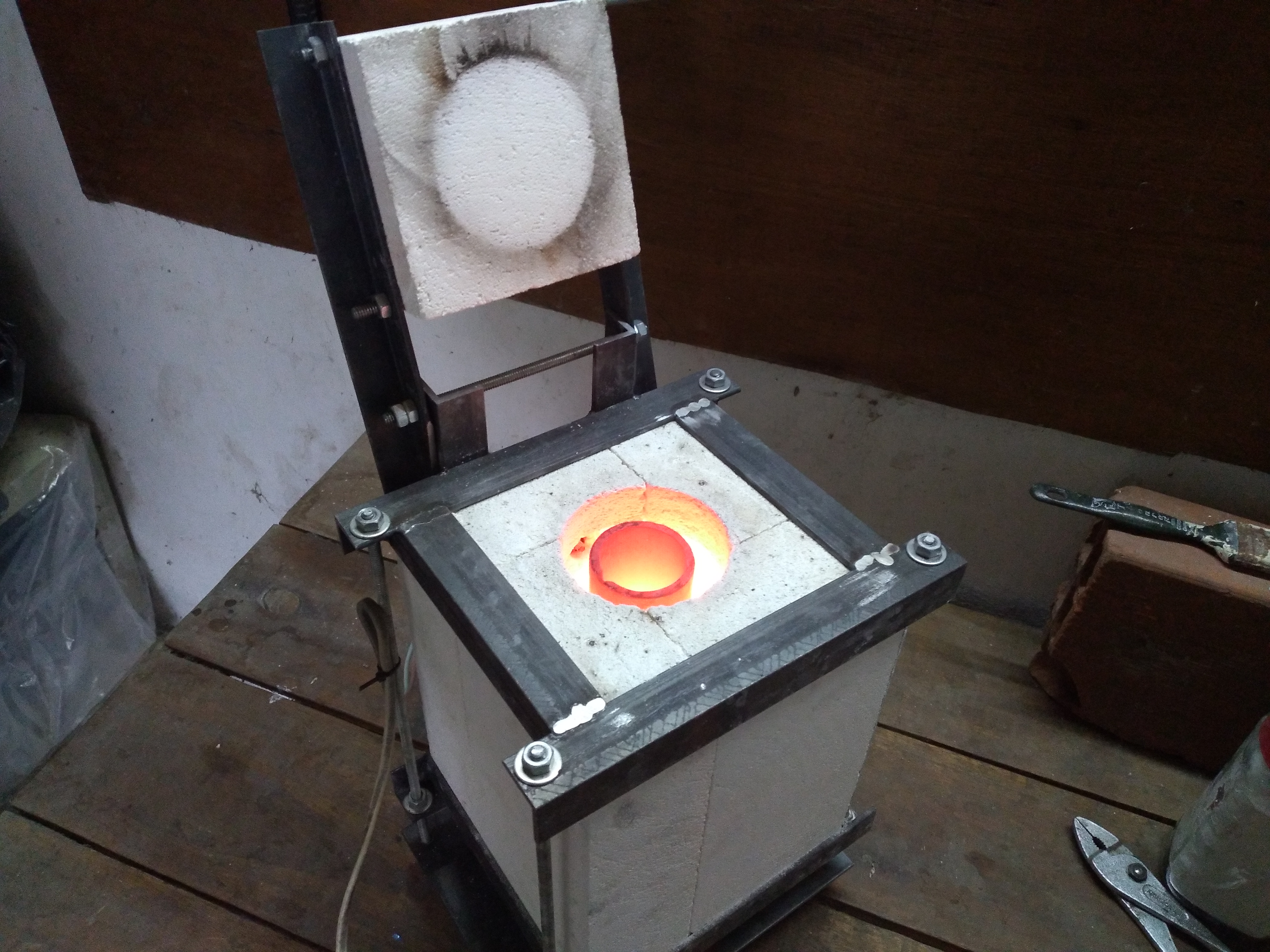
ES MUY
IMPORTANTE apagar el horno para colocar y quitar el crisol ya que fácilmente podremos
cortocircuitar la resistencia. También es muy importante colocarlo bien centrado
en el horno.
Control:
La parte eléctrica
no está aislada ni puesta a tierra, tengo que emprolijar todo eso.
Mi idea es que
el horno se apague cuando la tapa está abierta. También tengo la idea de hacer
un simple control de temperatura con una termocupla casera, un amplificador
operacional doble, un par de relés entre otras cosas.
A pesar de no
tener control de temperatura creo que es difícil que el horno se pase de temperatura
ya que limité mucho la potencia para alargar la vida útil de la resistencia que
es de solamente Ø1 mm y mi idea es usarlo solamente para fundir aluminio.
Resistencias de
mayores diámetros son ideales, pero mucho mas costosas ya que al aumentar el diámetro
disminuye la resistencia por lo que se necesitan muchos mas metros de alambre
para mantener la misma potencia. En un horno tan pequeño no habría forma de
meter mas metros de alambre.
Conclusiones:
Un horno eléctrico
me parece la mejor opción para fundir pequeñas cantidades de aluminio, comparándolo
con horno a carbón o gas.
Dentro de las
ventajas ya mencionadas son más limpios, silenciosos, seguros y se pueden usar
en el interior.
Las desventajas
principales son que el costo de materiales y la potencia consumida aumentan
mucho al aumentar el tamaño. También es más lento frente a otros métodos.
Este horno es
mi primera experiencia en fundición de metales, por eso quise que sea lo mas
pequeño posible y de baja potencia.
La idea del
proyecto es empezar un nuevo hobby y dependiendo de que tanto me entusiasme
probas distintas técnicas, como fundición con poliestireno expandido, con
moldes de arena, PLA perdido, entres otros. Tampoco descarto la idea de hacer
un horno mas grande a futuro y otros equipamientos.
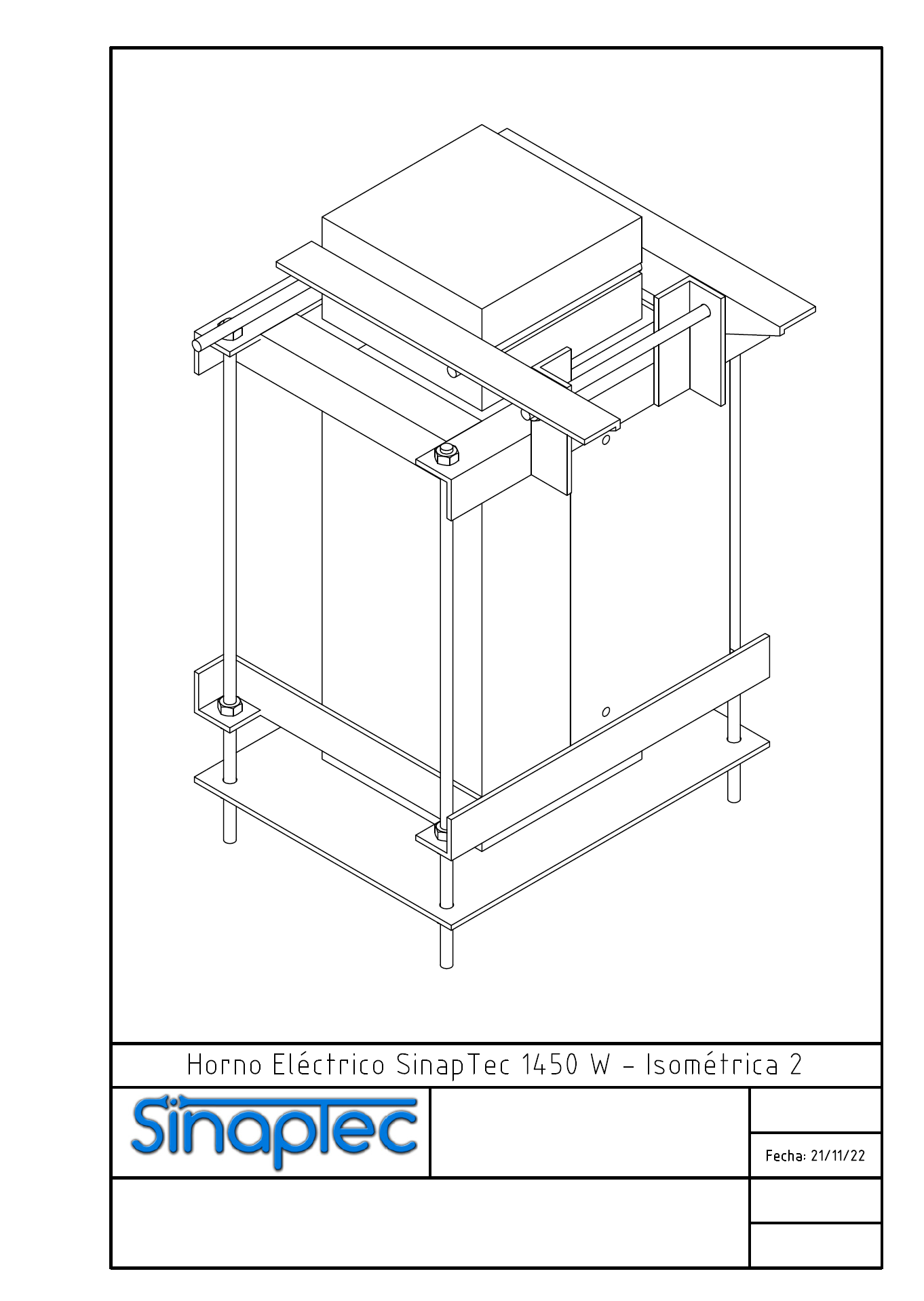
PLANOS: